电液伺服阀由于其高精度和快速控制能力,除了航空航天和军事装备广泛使用的领域外,在机床、塑料、轧钢机、车辆等各种工业设施的开环或闭环的电液控制管理系统中。特别是系统要求高的动态响应、大的输出功率的场合获得了广泛应用。
(1)电液伺服阀的位置控制回路。图172所示为电液伺服阀控制的液压缸直线 (a)所示为其原理图,图172 (b)所示为其职能方框图。当系统由指令电位器输入指令信号后,电液伺服阀2的电气机械转换器动作,通过液压放大器(先导级和功率级)将能量转换放大后,液压源的压力油经电液伺服阀向液压缸3供油,驱动负载到预定位置,反馈电位器(位置传感器)检测到的反馈信号与输入指令信号经伺服放大器1比较,使执行器精度运动在所需位置上。
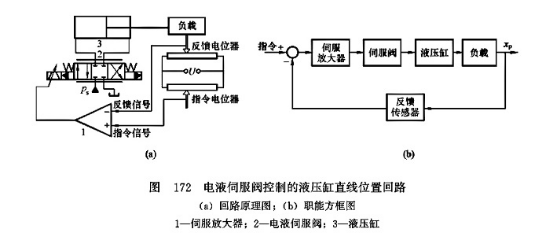
图173所示为电液伺服阀控制的液压马达直线 (a)所示为其原理图,图173 (b)所示为其职能方框图。当系统输入指令信号后,由能量转换放大,液压源的压力油经电液伺服阀2向液压马达3供油,齿轮减速器4和丝杠螺母机构5将马达的回转运动转换为负载的直线运动,位置传感器检验测试到的反馈信号与输入指令信号经伺服放大器1比较,使负载精度运动在所需位置上。
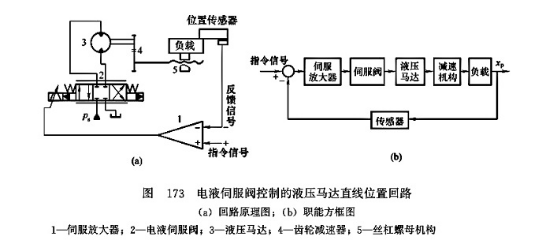
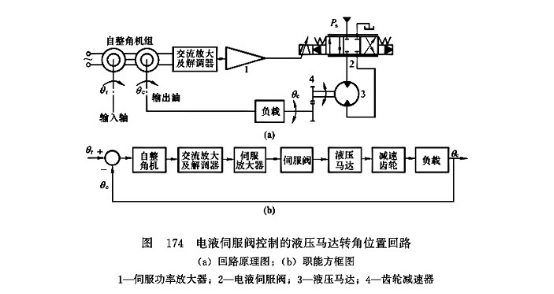
图174所示为电液伺服阀控制的液压马达转角位置回路,图174 (a)所示为其原理图,图174 (b)所示为其职能方框图。它采用白整角机组作为角差测量装置(3根线表示定子绕组的引出线根线表示转子绕组的引出线,通过圆心的点画线表示转轴),输入轴与发送机轴相连,输出轴与接收机相连。自整角机组检测输入轴和输出轴之间的角插,并将角差转换为振幅调制渡电压信号,经交流放大器放大和解调器解调后,将交流电压信号转换为直流电压信号,再经伺服功率放大器l放大,产生一个差动电流去控制电液伺服阀2,液压能量放大后,液压源的压力油经电液伺服阀2向液压马达3供油,马达通过齿轮减速器4驱动负载作回转运动,经上述反馈信号与输入指令信号的比较,使负载精确运动在所需转角位置上。
(2)电液伺服阀的速度控制回路。图175所示为利用电液伺服阀控制双向定量液压马达回转速度保持一定值的回路,图175 (a)所示为其原理图,图175 (b)所示为其职能方框图。当系统输入指令信号后,电液伺服阀2的电气机械转换器动作,通过液压放大器(先导级和功率级)将能量转换放大后,液压源的压力油经电液伺服阀向双向液压马达3供油,使液压马达驱动负载以一定转速工作;同时,测速电动机(速度传感器)4的检测反馈信号uf与输入指令信号经伺服放大器1比较,得到的误差信号控制电液伺服阀的阀口开度,从而使执行器转速保持在设定值附近。
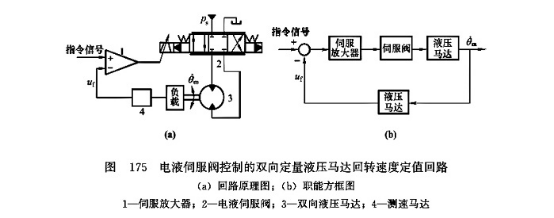
图176所示为开环变量泵控制的液压马达速度回路,图176 (a)所示为其原理图,图176 (b)所示为其职能方框图。双向变量液压泵5、双向定量液压马达6及安全溢流阀组7和补油单向阀组8组成闭式油路,通过改变变量泵5的排量对液压马达6调速。而变量泵的排量调节通过电液伺服阀2控制的双杆液压缸3的位移调节来实现。执行元件及负载与电液伺服闷控制的液压缸之间是开环的。当系统输人指令信号后,控制液压源的压力油经电液伺服阀2向双杆液压缸3供油,使液压缸驱动变量泵的变量机构在一定位置下工作;同时,位置传感器4的检测反馈信号与输入指令信号经伺服放大器1比较,得出的误差信号控制电液伺服阀的阀口开度,从而使变量泵的变量机构即变量泵的排量保持在设定值附近,最终保证液压马达6在希望的转速值附近工作。
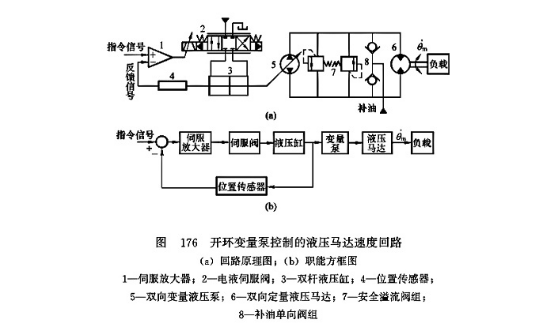
图177所示为闭环变量泵控制的液压马达速度回路,图177 (a)所示为其原理图,图177 (b)所示为其职能方框图。其中油路结构与图176所示开环变量泵控制的液压马达速度回路基本相同,所不同的是在负载与指令机构间增设了测速电动机(速度传感器)9,从而构成一个闭环速度控制回路。因此其速度控制精度更高。

(3)电液伺服阀的力和压力控制回路。图178 (a)所示为电液伺服阀的力控制回路.油源经电液伺服阀2向双杆液压缸3供油,液压缸产生的作用力施加在负载上,力传感器4的检测反馈信号与输人指令信号经伺服放大器1比较,再通过电液伺服阀控制缸的动作,从而保持负载受力的基本恒定。图178(b)所示为维持双杆液压缸两腔压力差恒定的控制回路,当电液伺服阀2接受输入指令信号并将信号转换放大后,使双杆液压缸3两腔压力差达到某一设定值。缸内压力变化时,液压缸近旁所控制的压差传感器5的检测反馈信号与输人信号指令经伺服放大器1比较,再通过电液伺服阀控制缸的动作,从而保持液压缸两腔压差的基本恒定。图178(c)所示为电液伺服阀的力和压力控制回路的职能方框图。
(4)电液伺服阀的液压缸同步控制回路。图179所示为利用电液伺服阀放油的液压缸同步控制回路。分流阀6用于粗略同步控制,再用电液伺服阀5根据位置误差检测器(差动变压器)3的反馈信号进行旁路放油,实现精确的同步控制。该回路同步精度高(达0.2mm),可自行消除两缸位置误差;伺服阀发生故障时仍可实现粗略同步。伺服阀可采用小流量阀实现放油,但成本比较高,效率较低,适用于同步精度要求比较高的场合。
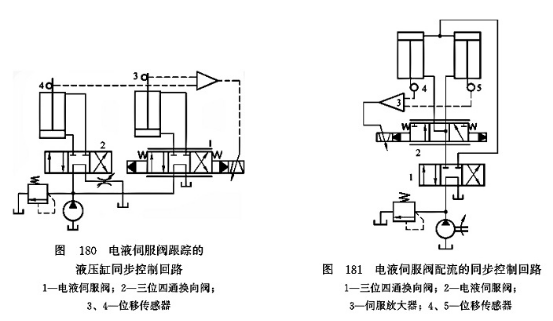
图180所示为利用电液伺服阀跟踪的液压缸同步控制回路。电液伺服阀1控制阀口开度,输出一个与换向阀2相同的流量,使两个液压缸获得双向同步运动。该回路同步精度高,但价格较贵。适用于两液压缸相隔较远,有要求同步精度很高的场合。
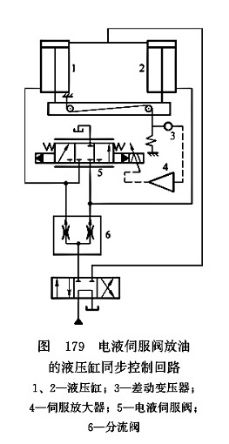
图181所示为利用电液伺服阀配流的同步控制回路。电液伺服阀2根据位移传感器4和5的反馈信号持续地调整阀口开度,控制两个液压缸的输人或输出流量,使它们获得双向同步运动。该回路的特点与图175所示回路相同。
调整:将新更换的部件来安装,接着进行调整,确保电液伺服阀的动作和压力等参数符合要求。
在进行电液伺服阀维修操作前,需要对操作的人进行安全培训和液压系统的排空、排气工作。同时,需要用符合相关规定的工具和材料,避免损坏电液伺服阀和液压系统。
摘要:本文介绍了Campbell子系统参考设计(MAXREFDES4 #)在工业控制和工业自动化中的应用,能够很好的满足这类产品对高分辨率、高隔离度的需求。文中提供了FFT和直方图实验室测试结果,并给出了硬件和固件设计文件。 简介 在工业控制和工业自动化应用中,常常要高分辨率数据转换器。虽然今天的现场可编程门阵列(FPGA)和微控制器内部集成了数/模转换器(ADC),但在多数情况下,ADC的分辨率不高,也缺乏足够的隔离。Campbell子系统参考设计(MAXREFDES4 # )为16位高精度工业模拟前端(AFE),可接收一路4-20mA电流环或一路0.2V至4.096V的电压输入信号,提供隔离电源和完整的数据采集小型化设计。Cam
4-20mA输入隔离模拟前端(AFE) /
6月14日,在盖世汽车主办的2023第五届无人驾驶地图与定位大会之际,润芯微科技作为国内头部汽车GNSS合作伙伴,推出了近期开发的高精度定位终端产品,带来厘米级定位新解决方案。 随着车道偏离预警(LDW)、自适应巡航控制(ACC)、自动泊车等无人驾驶系统的使用率逐步的提升,无人驾驶安全性和可靠性迎来了更高的定位精度需求。而对于无人驾驶来说,意义最重大的两方面,一是通信安全,其次是定位安全。 在此背景下,润芯微科技与天合智控联合开发推出了一款车规级面向智能驾驶场景的高精定位终端产品-RVT-IV-PBOX。它是基于合作公司的F9K模组(支持高速及城市场景下的NOA(L2+,L2++等级的辅助驾驶系统)车道级保持),融合高
定位终端产品,带来厘米级定位新解决方案 /
技术生涯,半生荣辱,每天都是生活在痛并快乐中,我讨厌的东西总是不得不天天面对,麻木和无所谓也就是这样产生的.但对于技术的好奇和追求是我下半生依然不会停止的事情,虽然驽钝,只要每日有所得,也有所追求足以. 这两天在忙于另外一个程序,由于上家的延误,使我又有了点空闲,继续来学习已经不是新事物的新事物.:-) 前几天决定了从简单的单任务Arm程序学起,放下手中的uC/OS-II书籍,发现手中又少了可以阅读的东西.好在网上有很多可以借鉴的资料,只是这些资料不是专为LPC2400写的.不过没关系,手里还有LPC2400的datasheet,对照的看就可以了.Arm的原理大同小异,只是型号之间有所区别罢了. 下面的这本书对初学者很有
温度测量主要有两种方式:一种是传统的接触式测量,另一种是以红外测温为代表的非接触式测量。传统的温度测量不仅反应速度慢,而且必须与被测物体接触。红外测温以红外传感器为核心进行非接触式测量,非常适合于高温和危险场合的非接触测温,得到了广泛的应用。本文将详细的介绍如何设计基于SOC级微处理器的高精度红外测温系统,及其在电力温度检测、设备故障诊断方面的应用。 1.红外测温仪的工作原理 自然界一切温度高于绝对零度的物体,都在不停地向外发出红外线。物体发出的红外线能量大小及其波长分布同它的表面温度有密切关系,物体的辐射能量与温度的 4 次方成正比,其辐射单位体积内的包含的能量与物体本身的温度关系符合普朗克定律。因此我们经过测量物体辐射出的红外
红外测温系统的设计 /
线是AD公司生产的高精度真有效值功率检测器,它采用了独特的双平方单元闭环比效转换电路技术,因而具有优良的性能。可用于2.5GHz高频范围的射频发射接收信号链的测试及CDMA、W-CDMA、QAM和其它一些复杂调制波形的测量。文中给出了详实的使用技术参数和各种典型的性能分析。 关键词: 有效值 功率 平方 AD8361 1 概述 AD8361是一个真有效值的功率检测器,可应用于高达2.5GHz的高频率范围的发射接收信号链的测试。采用单一电源,并能在2.7V~5.5V之间工作。在大多数应用中,只需一个电源退耦电容和输入耦合电容即可工作且输出呈线
管网漏损对于大部分自来水公司来说,都是一个棘手的问题,也是供水产销差居高不下的重要原因之一。对于藏在地下管段中的漏洞,过去只能靠人工一点一点排查,需要大量时间及人力。如今智慧水务给了我们一个全新方式,只需稍稍对管网做改造,装上高精度智能水表,就能实现很好的漏损监测控制效果。 Question:智慧水务究竟怎么来降低漏损? 海威茨智慧水务平台提供的一种叫 “DMA分区计量漏损分析”的方案,顾名思义,就是通过分区域的供水计量来分析漏损情况,具体实施过程如下: Ø 供水管网层级划分:对供水管网按真实的情况进行层级划分,例如将城市中一个辖区设为一级区域,其中的居民集中区(或街道)设为二级区域,小区设为三级区域,那么整个城市
目前,电力滤波器多采用数字化控制器实现,需要工程师有较高的软件编程能力。这样,滤波器设计周期的绝大部分时间将用于程序的编写以及优化上。考虑到数学模型的建立、算法的设计、离线调试,整个开发时间将非常长,成本将相应增加。 快速控制模型(Rapid Control Prototyping,RCP)的设计降低了设计周期,利用Simulink的图形化编程方法,不再有必要进行复杂的程序编写:对于硬件工程师而言,改变模型参数就能轻松实现现场调试;对于理论研究人员而言,只需要仔细考虑算法的快速性和实用性。 小波变换是一种分析非稳态电压和电流波形的快速而有效的方法。同FFT一样,小波变换将信号分解成频率分量。但是,离散小波变换(
模型的混合型电力滤波器设计 /
0 引 言 对于微小压差的测最,传统的方法是采用U型管压力计,该压力计结构相对比较简单,价格实惠公道,性能可靠,缺点是无法记录压力的瞬态变化,读数慢而读数误差大,人工估读时,最大精度也只能精确到0.5 mm液柱高度。为了更好的提高灵敏度,减小读数误差,随之又出现了倾斜管压力计,如果倾斜管压力计的测量管倾斜角为30°,则测量精度可提高1倍。 随着压力传感器技术的发展,近年来又出现了电子微压差传感器,可将微小压力直接转换成电信号输出。此类传感器使用起来更便捷,反应速度快,精度也能做到较高,目前比较好的微压传感器测量分辨率已达到10 Pa左右。缺点是稳定性不够好,温漂和时漂都比较大,且价格昂贵。 上述微压测量方法各有利弊,如果要继续提高测量精度,以上测
2024年4月3日 – 专注于推动行业创新的知名新品引入 (NPI) 代理商™贸泽电子 (Mouser Electronics) 紧跟潮流,通过内容丰富的沉浸式 ...
4月3日消息,据新闻媒体报道,由于Exynos效能始终和高通有差距,三星将继续采用双处理器策略,高通骁龙处理器仍将在S25系列上出现。此前有报道 ...
AP2905 是一款高效率同步降压稳压器,在 6 V ~ 40 V 宽输入范围内可提供 0 7 A 输出电流。固定5 V输出版本可节省 2个分压电阻 ...
PN8370M+PN8306M小体积5v2a充电器方案因其节省外围、稳定性很高、功能齐全、深受工程师青睐,在市场得到了广泛应用。PN8370M是一款高性能的原 ...
PN8611集成超低待机功耗原边控制器、FB下偏电阻和电容、VDD供电二极管、CS电阻及650V高雪崩能力智能功率MOSFET,用于高性能、外围元器件超 ...

嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科词云:



